
▍文章来源于康谋自动驾驶
01 引言
在前两篇文章中,我们系统阐述了非结构化道路场景的构建路径。第一篇《如何高效构建与测试非结构化道路场景?》从宏观层面剖析了非结构化道路测试的必要性与技术挑战,并介绍了aiSim通过集成外部工具实现逻辑路网与高真实感地形结合的总体解决方案。第二篇《从OpenDRIVE到Atlas:道路数据编辑与格式适配解析》则深入技术细节,说明了如何利用行业标准的OpenDRIVE格式,通过道路编辑器生成基础道路逻辑,再经由aiSim Atlas工具链转化为包含语义标签与基础模型的初始地图资产。
至此,我们拥有了一个具备完整道路拓扑和初步视觉表现的Atlas地图。然而,正如前文所述,这个阶段的地图仍处于“基础状态”,地形呈现较为简易、缺乏静态细节。若直接用于仿真,车辆动力学反馈仍基于相对平坦的路面假设,难以真实反映坑洼、起伏的影响;摄像头与雷达传感器也无法捕捉到复杂路况下的真实物理反馈。这正是本文要解决的核心问题:如何将带有逻辑信息的“标准地图”,深化为几何细节丰富、物理属性真实、视觉表现高保真的“可仿真数字孪生场景”?
对此,aiSim提供了基于UE5与Blender的深度编辑工作流。本文将详细阐述如何通过这一链路,为地图注入几何细节、物理属性与环境资产,完成从逻辑数据到高保真仿真场景的最终跃迁。
02 Atlas地图导入与UE环境适配
工作流的第一步是将Atlas地图加载至UE环境中。aiSim直接提供了内含多功能插件的UE5项目工程文件,其核心功能之一便是Atlas地图的导入。
由于Atlas地图本质是以.gltf、.json等文件形式存储在资产库中的,在aiSim Plugin的支持下,只需拖拽地图目录下的map.json至UE视口,即可完成导入。此时,原本抽象的OpenDRIVE数据会以静态网格体(Static Mesh)的形式呈现在UE视口中。
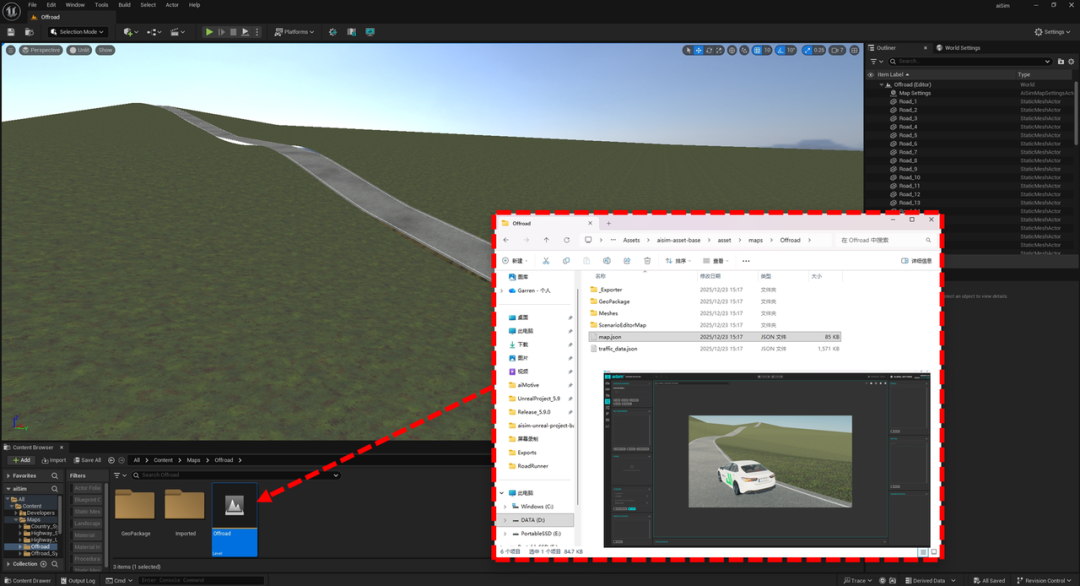
图1:仅需一步拖拽,实现aiSim地图到UE地图的快速导入
这一步骤不仅加载了道路、地形的几何模型,更重要的是同步导入了地图的道路逻辑。通过TrafficDataActor,这些逻辑可以SplineActor的形式可视化呈现,为后续自动化模型放置和仿真车辆行驶路线的确认提供参考基准。
03 基于Blender的模型深度精细化编辑
在第一步导入的地图中,地形通常相对光滑,且道路与地形接缝处可能存在落差。针对这些问题,需要对静态网格体进行二次编辑。
对于简单的地形落差或宏观层面的调整,可在UE中使用Modeling Mode下的Deform工具(如Dynamic Sculpt或Vertex Sculpt)进行快速处理。但当需要刻画路面坑洼、车辙、地形与道路的平滑过渡等微观几何细节时,则需借助Blender等专业建模工具。
图2:基于UE与Blender的路面编辑工作流
aiSim在导入过程中已将地形与道路分离为独立模型,并按照统一坐标系对齐。用户可以分别导出两者的FBX文件至Blender进行编辑。
对于道路,可以提取模型的Edge并转换为Curve对象,结合基于车辆轮距设计的横截面进行扫描,形成坑洼道路雏形;
随后可以遵循道路小网格、地形大网格的基本准则,对道路、地形都进行网格的重分布,并施加一定随机噪声,完成道路与地形的模型的“坑洼化”;
最后可以对道路和地形进行材质编辑,生成对应的Color、xRoMe、Normal纹理,结束整体的编辑;
编辑完成后,模型以FBX格式导出,作为静态网格体配合aiSim Prop的优化LOD Group重新导入UE。
通过这种方法,可以在不破坏道路整体趋势与交通逻辑的前提下,实现模型层面的高精度细化。
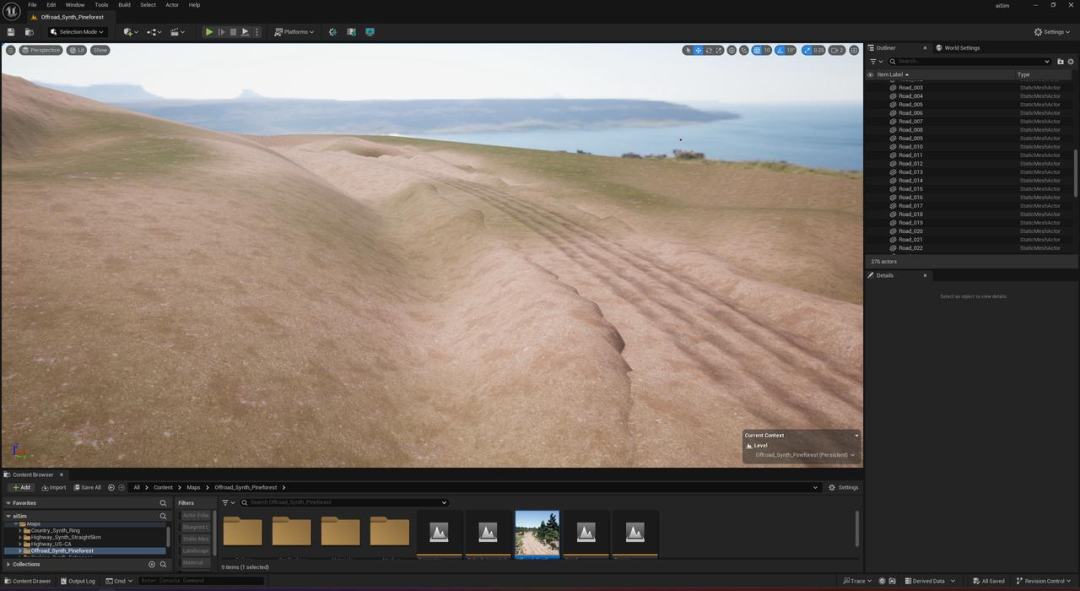
图3:Blender二次编辑后的道路与地形
04 模型资产集成与语义属性配置
完成坑洼地面的几何编辑后,场景的真实度提升还需依赖环境元素的补充。从杂草、树木、石块等自然要素,到锥桶、路灯、建筑等人造设施,aiSim内置了数千种3D资产可供直接调用。这些资产不仅模型多样,其材质实例更针对仿真器渲染引擎进行了优化,除了Color与Normal纹理外,还增设了用于描述反射率的xRoMe纹理,使雷达传感器仿真数据更具真实性。
图4:aiSim 3D资产概览
在物理属性层面,aiSim插件允许为道路、地面等模型配置详细的碰撞属性。在Detail面板中,可以为路面、碎石、障碍物等赋予OBB或Triangle Mesh级别的碰撞体,满足动力学仿真对接触反馈的精度要求。
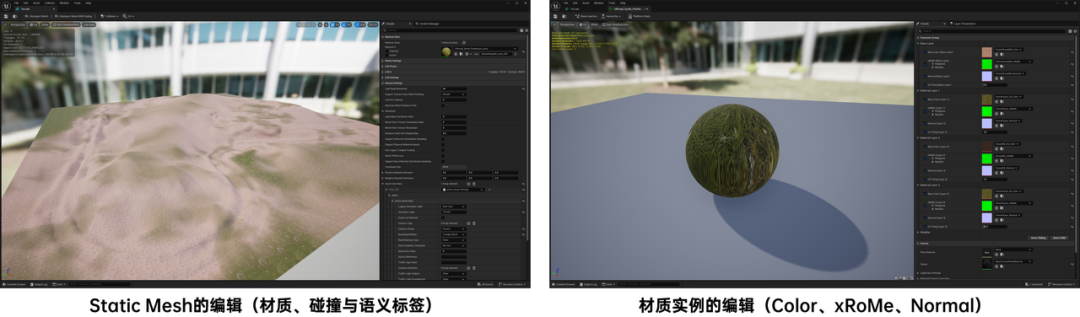
图5:模型与材质编辑示例
在感知层面,aiSim资产库的模型自带语义标签,同时插件也支持自定义配置。用户可以为每个静态网格体指定独特的Semantic Label,并在仿真器词典库中定义对应的类型与颜色。
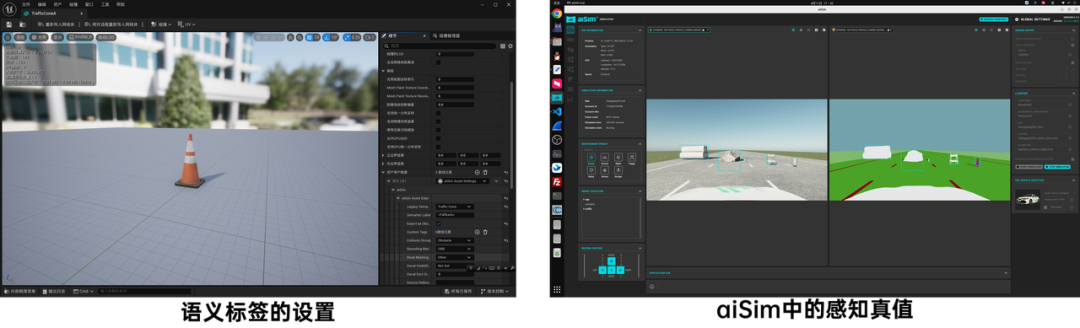
图6:UE语义标签与aiSim仿真运行示例
仿真运行时,这些信息可作为感知真值输出,生成语义分割图像与2D/3D边界框,用于算法验证。外部导入的FBX模型在确保材质模板统一后,同样支持语义标签配置,大幅提升了地图编辑的灵活性。由此,便可以施加各种各样的3D资产到地图中,丰富地图的表达。
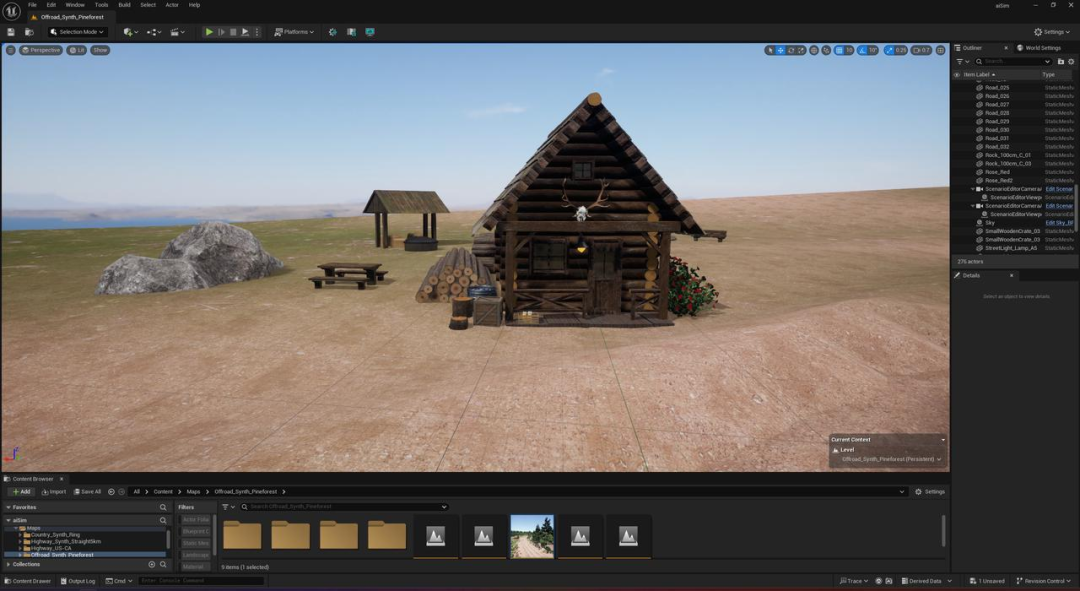
图7:添加3D资产示例
05 批量铺设与自动化工具应用
面对非结构化场景中大范围的环境要素布置(如路边护栏、连续植被),手动摆放效率低下且难以保证分布的自然度。aiSim Plugin提供了两套高效的解决方案:
基于UE Foliage的随机铺设
通过UE原生的Foliage Mode,可将特定静态网格体转化为Foliage实例。该模式下,用户能以笔刷形式在指定区域随机、大面积地放置和消除植被、石块等元素,并通过调整密度、尺寸、姿态等参数,实现自然、多样化的分布效果。

图8:UE Foliage Mode大面积随机铺设
基于aiSim BluePrints的序列化批量放置
aiSim Plugin Content的Utilities目录下提供了多种专用蓝图工具,用于沿特定路径或区域进行批量布置。常用工具包括:
RandomMeshInstancesAlongSpline:沿样条线批量放置静态网格体实例;
RandomClassAlongSpline:沿样条线布置带有动态属性(如可开关的路灯)的蓝图类;
StairsAlongSpline:沿样条线生成台阶;
RandomElectricPillarsAlongSpline:沿样条线布置电线杆;
ModularBuilding:基于多边形区域生成楼房模型;
PlantPlacer与FoliageBed:实现植被与花坛的区域化布置。
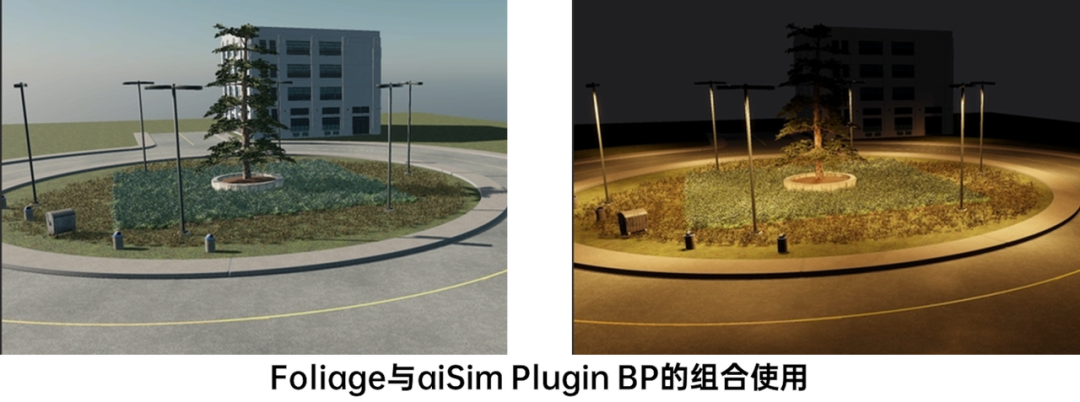
图9:自动化操作与批量铺设示例
在两种方法的辅助下,便可以随心所欲地在地图上大规模放置环境要素,进一步让地图的真实度上升到一个新的境界,最终完成满足需求的非结构化道路。
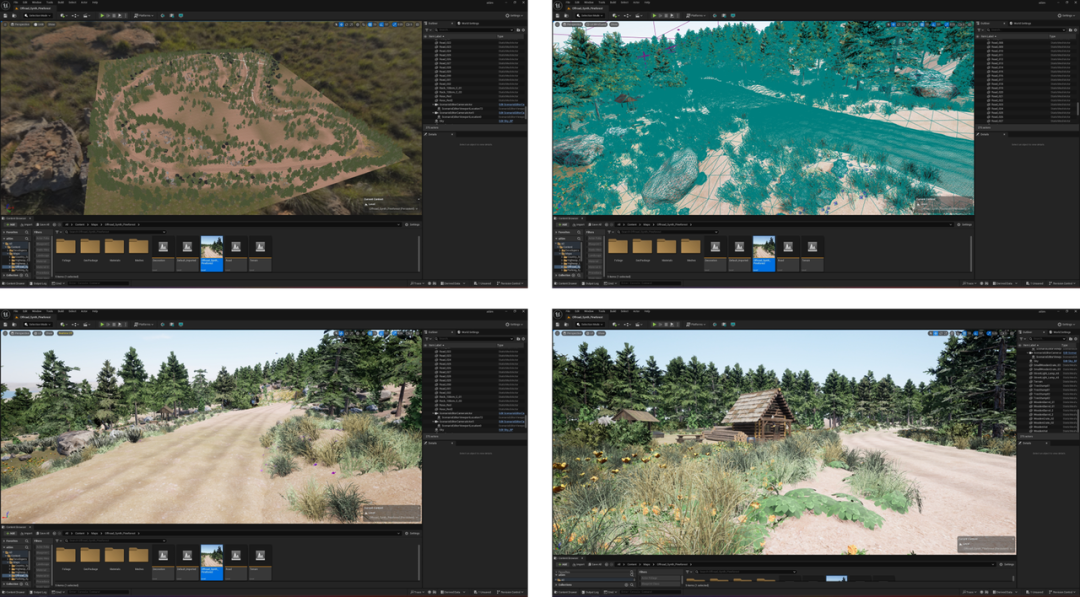
图10:最终效果图(UE端)
06 地图导出与仿真闭环验证
完成所有编辑、材质赋予和属性定义后,进入工作流的最后一步。在aiSim的UE工程中,通过点击内置的地图导出按钮并选择保存路径,即可将当前场景连同所有引用的3D资产打包,输出为可供仿真器直接加载的Atlas格式地图。
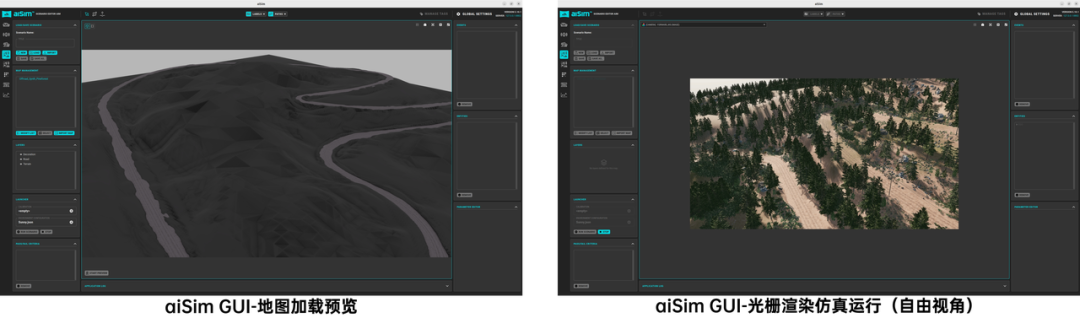
图11:最终效果图(aiSim端)
导出完成后,打开aiSim仿真器加载该地图,并结合OpenSCENARIO设计具体的测试用例。依托aiSim多样化的天气与传感器配置,可开展多种功能测试:
感知算法验证:配合Camera、LiDAR、Radar等传感器,开启感知真值输出,检验目标检测、图像分割、点云识别等算法的性能。
动力学与控制验证:设定自车以不同速度、加速度通过坑洼路面、障碍物等区域,结合车辆动力学模型输出的IMU数据与状态真值,评估底盘控制与轨迹规划算法的表现。
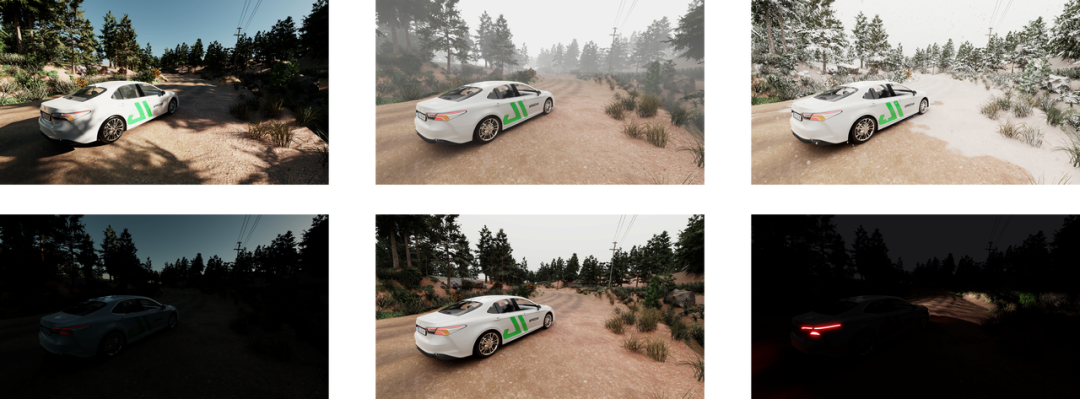
图12:高保真光追相机仿真示例
07 结语
至此,我们完成了从非结构化道路需求分析,到OpenDRIVE逻辑构建,再到UE与Blender联合编辑,最终回归aiSim仿真运行的完整技术路径阐述。
回顾这一系列文章,我们可以看到aiSim所提供的并非单一的工具,而是一条贯穿“标准数据→逻辑地图→高保真模型→闭环仿真”的技术通道。在这个通道中,严谨的道路逻辑与自由的艺术创造力得以结合,为智能驾驶测试构建出既符合物理规律又充满挑战的虚拟验证环境。
通过在仿真中充分暴露并解决复杂路况下的潜在问题,最终的目标是让每一次真实道路上的行驶,都能获得更多的“平稳”与“安全”。