
以下内容发表在「SysPro系统工程智库」知识星球
- 关于人形机器人关节模组电机技术系统性调研- 文字原创,素材来源:小象电动, 安徽大学,YASA、Traxial、BEYOND- 本篇为知识星球节选,完整版报告与解读在知识星球发布
导语:随着AI大模型的日渐成熟,人形机器人也从原先的遥不可及逐步走向了产业化。谈到人行机器人,更多地时候我们会关注大模型、灵巧手、整机品牌或者融资节奏。但如果我们从工程角度往里拆,很快就会发现,真正决定机器人能不能做出高动态动作、能不能长时间连续工作、能不能把成本打下来、能不能最终量产复制的核心部件之一,其实就是关节模组。再往里拆,关节模组的“心脏”就是关节电机。它不是一个单独发力的小零件,而是把扭矩密度、功率密度、响应速度、控制精度、热稳定性、尺寸约束与制造成本全部压缩到一起的系统级载体。

图片来源:安徽大学
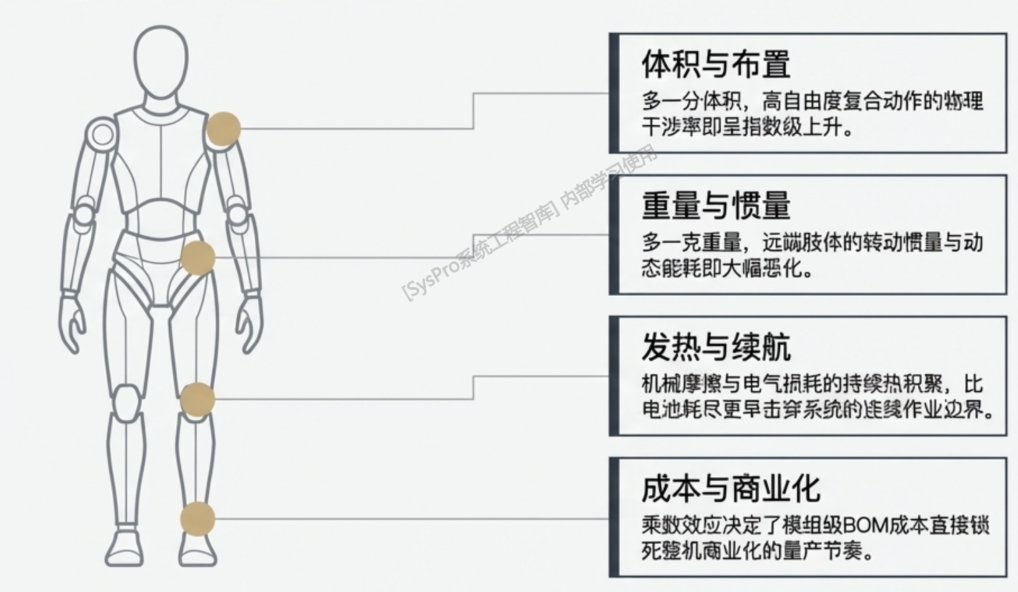
也正因为这样,关节电机绝不是传统伺服电机简单缩小一圈那么简单。今天我们看到的人形机器人,单机往往包含十几套甚至数十套旋转与直线模组。模组数量一多,任何一个单体设计上的偏差,都会被整机成倍放大:多一点体积,整机布置就更难;多一点重量,远端惯量就更大;多一点发热,连续工作时间就会缩短;多一点成本,整机商业化节奏就会被拖慢。所以我更愿意把关节电机理解成"整机矛盾最密集的缩影"。谁能把这颗电机真正做透,谁就更接近机器人产业化的关键门槛。
图片来源:SysPro
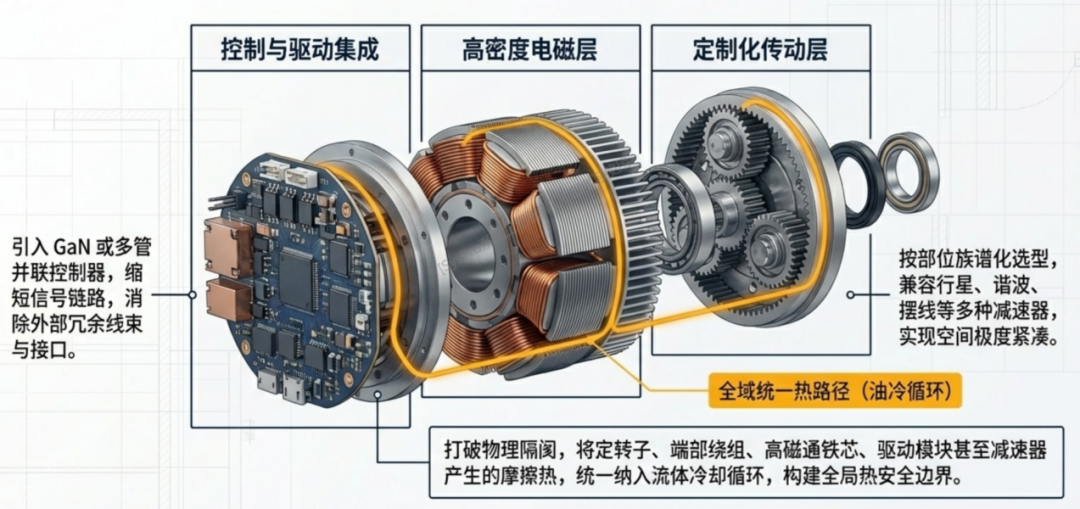
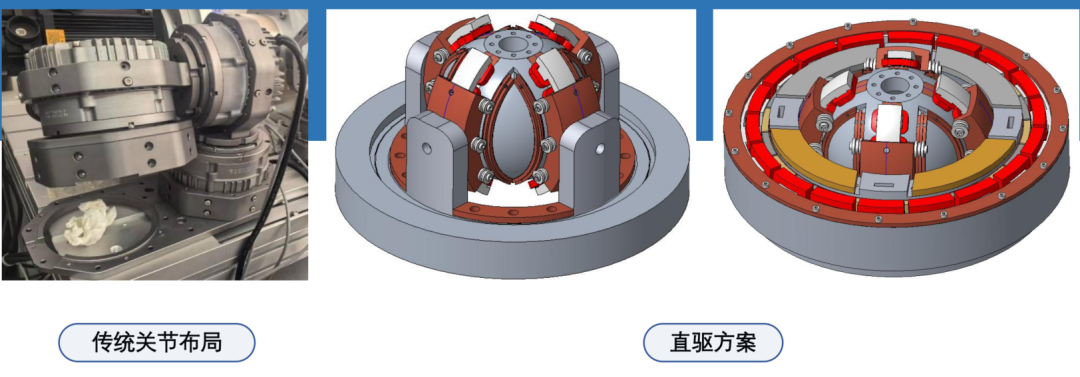
在这条路线上,轴向磁通之所以越来越热,不是因为概念新,而是因为它的拓扑特征确实更贴近机器人关节的核心诉求:更大半径、更短轴向、更容易形成薄盘式结构、更适合围绕高扭矩密度与紧凑集成去做文章。
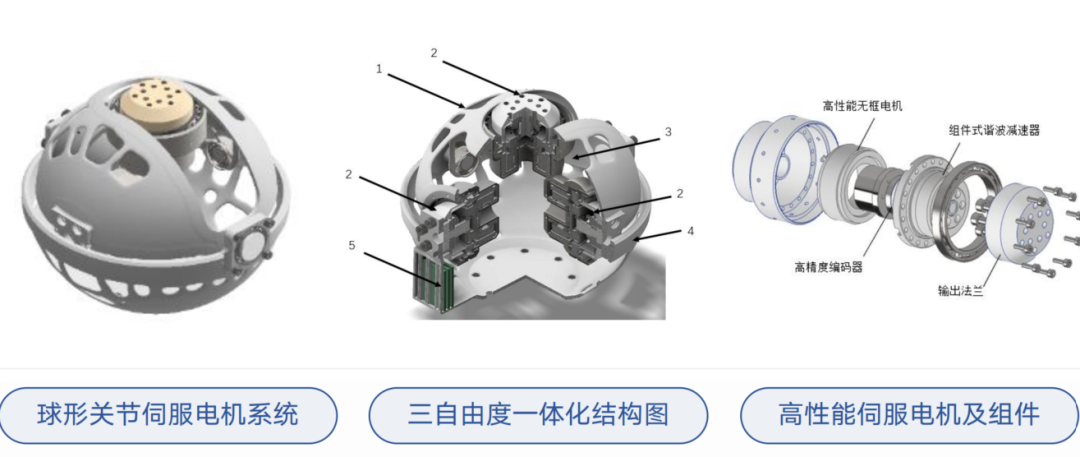
与此同时,围绕球形关节的一体化伺服系统研究也很值得重视。因为当我们不满足于“很多单自由度关节串起来”这种路线之后,就会自然走向一个更激进的问题:能不能在更小空间里,直接把多自由度运动能力做出来?这就把结构、电磁、热、传感与控制的难题一下子全部推到了前台。
这个系列,我们将对这个工程话题进行了拆解,分8个章节来讲讲这里面的工程逻辑和落地要点。我会先把关节电机为什么会成为机器人产业的关键冲突点讲清楚,再来看轴向磁通拓扑到底好在哪里、难在哪里;接着进入三合一关节模组与测试验证,然后进一步讲球形关节、多物理场建模、高精度控制和谐波补偿,最后回到材料工艺、自动化产线、跨行业外溢与未来三年的工程判断。顺着这条主线,我们一起能把"人形机器人关节电机"这件事,从概念、机理、样机、算法一直看到产品化。
图片来源: SysPro
目录
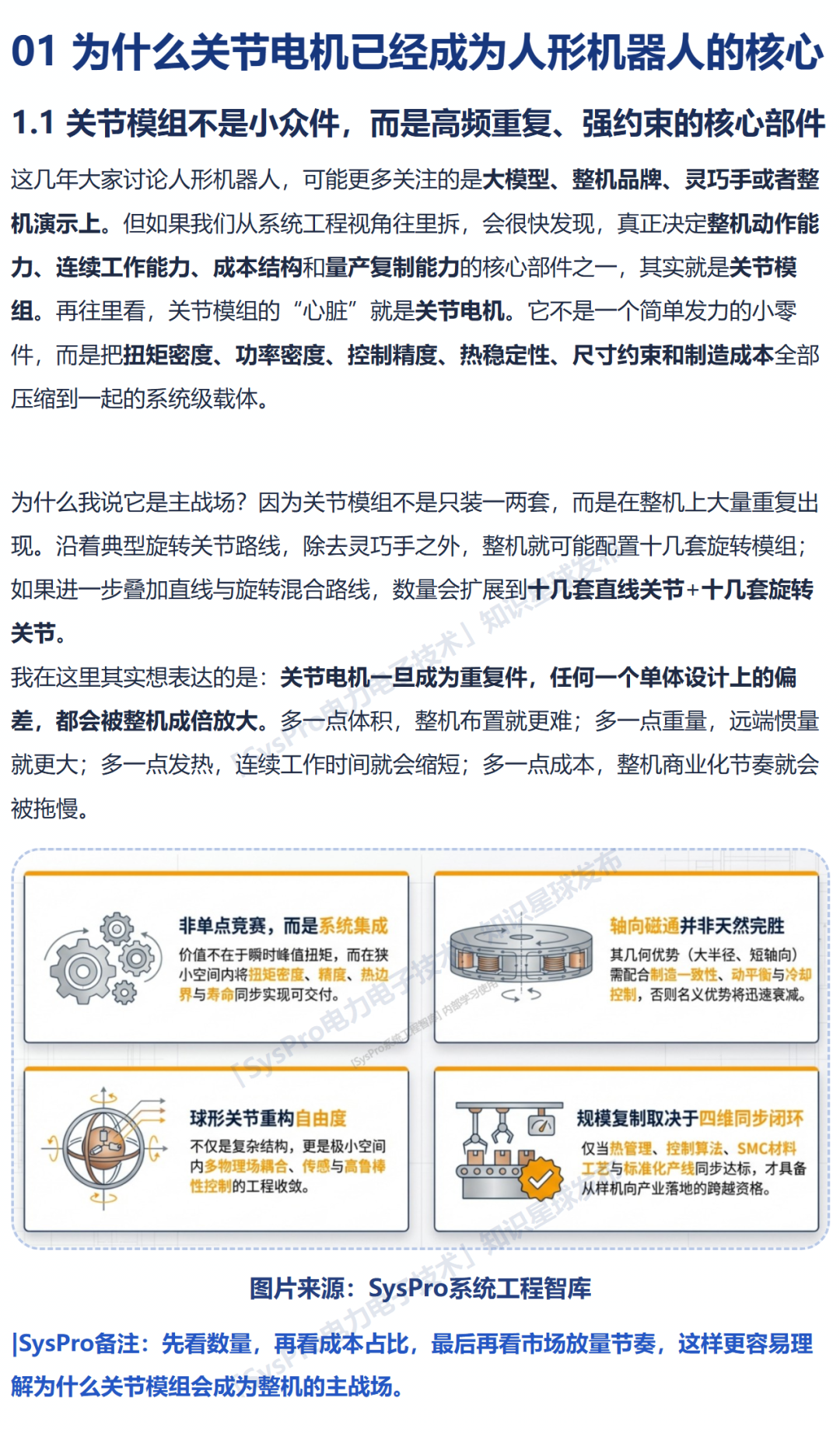
01 为什么关节电机已经成为人形机器人的主战场
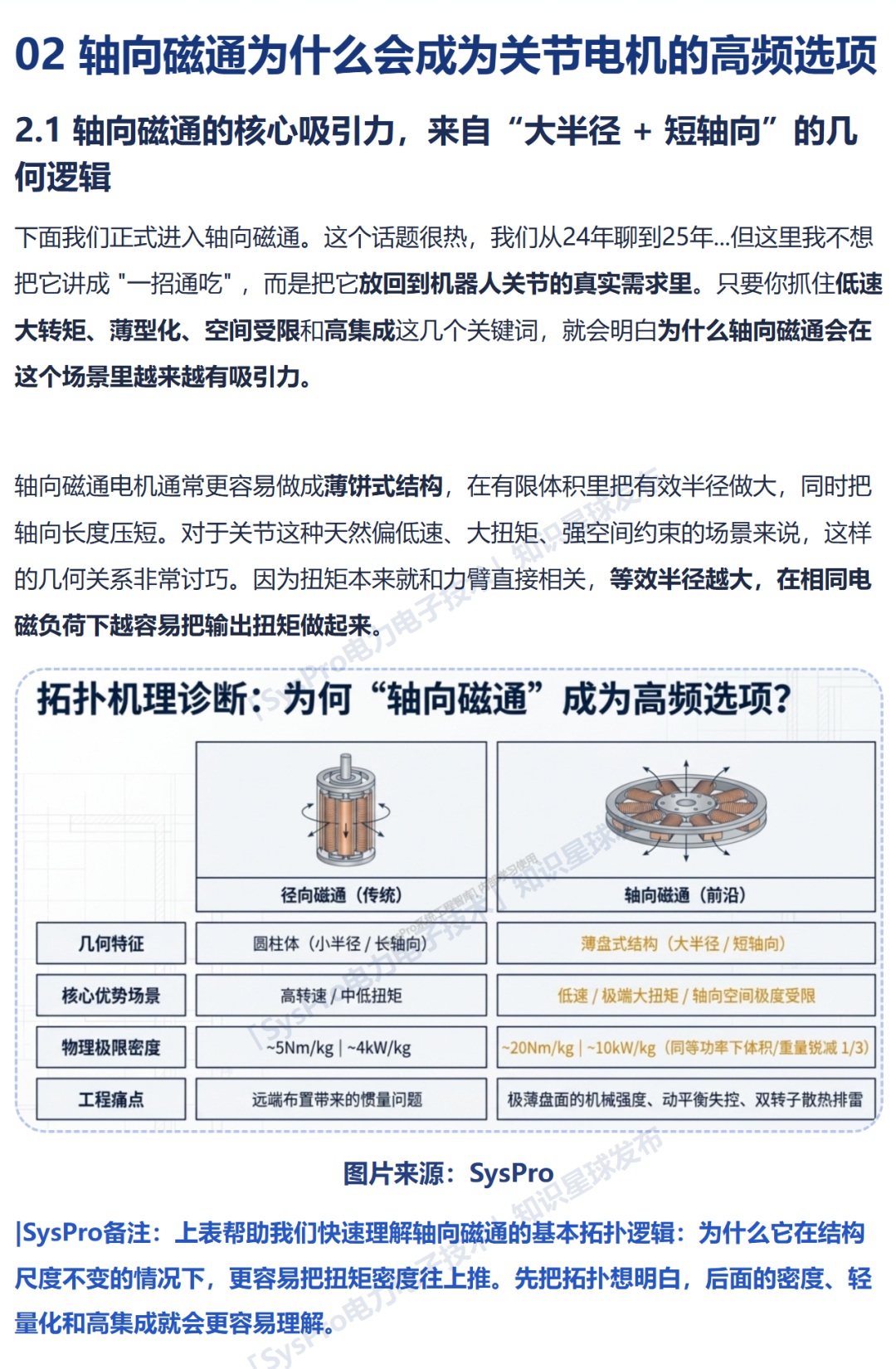
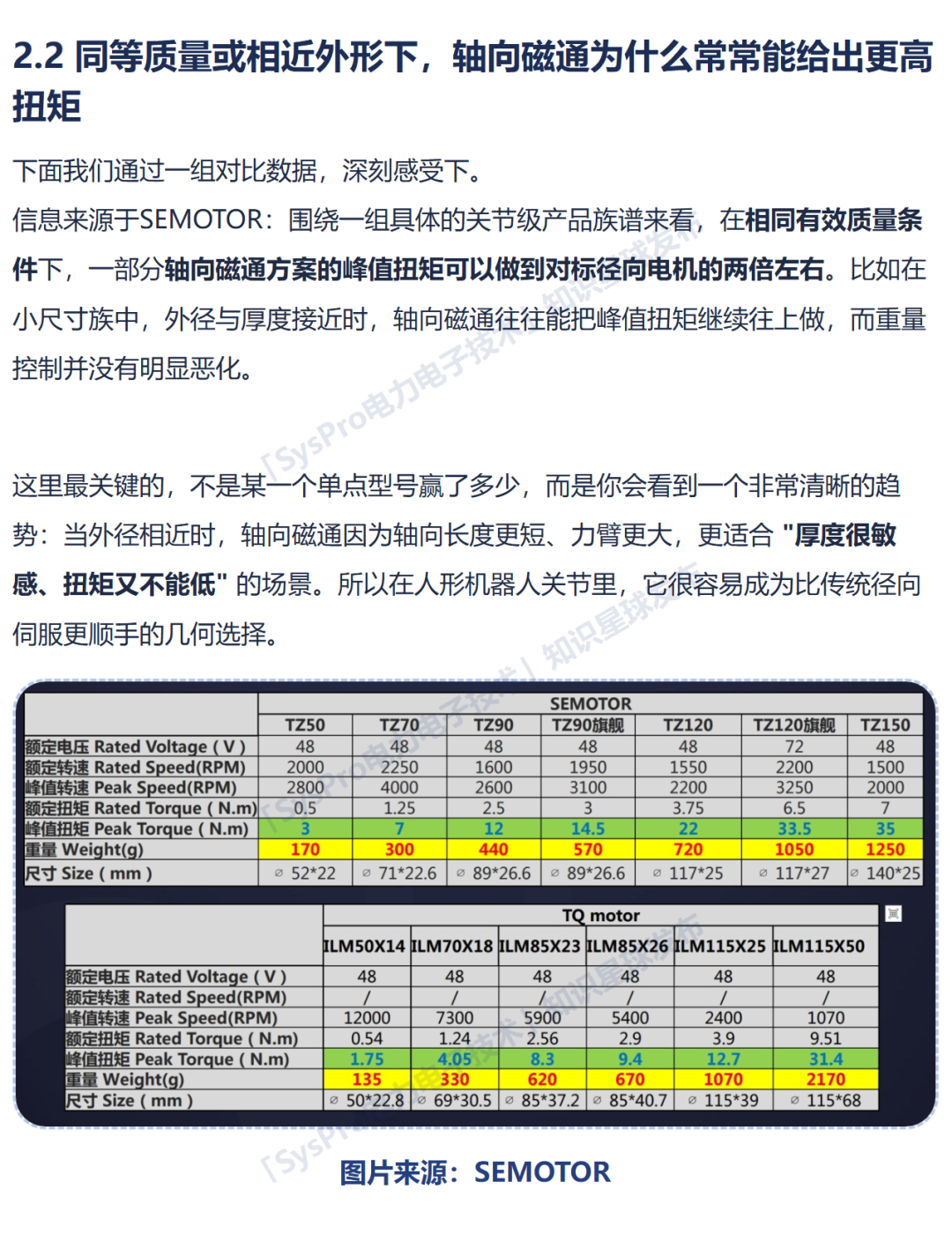
02 轴向磁通为什么会成为关节电机的高频选项
03 从单颗电机到关节模组:真正的竞争发生在系统集成()
04 球形关节:把多自由度做进狭小空间,难点到底在哪里()
05 热管理、位置检测与高鲁棒控制()
06 材料、工艺与量产底座:从样机走向产业化的关键门槛()
07 应用外溢:为什么不仅仅是人形机器人()
08 路线判断:未来三年,人形机器人关节电机应该重点看什么()
注:以上内容节选,完整内容知识星球中发布()



以下3~8章节在知识星球中持续更新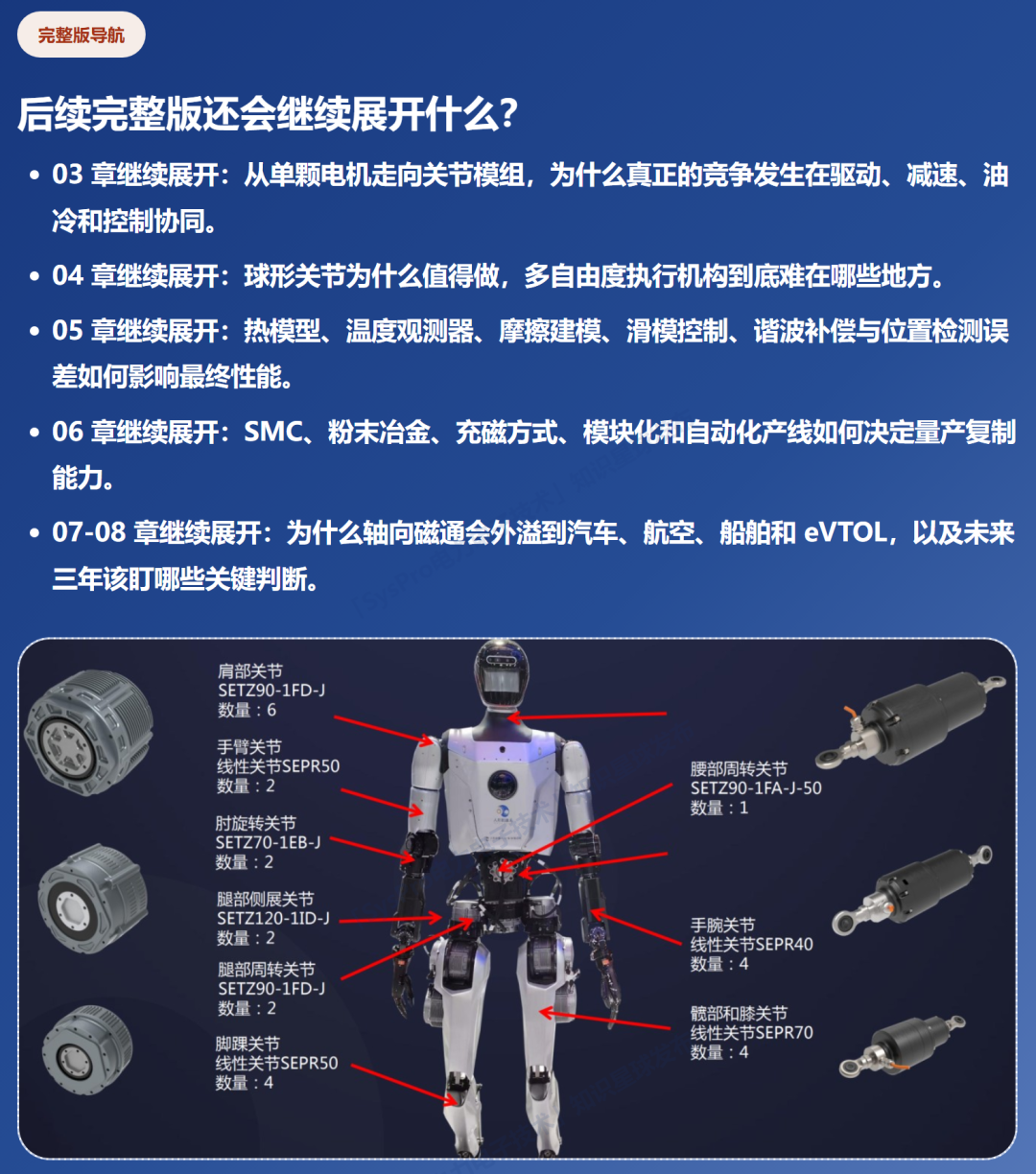
图片来源:安徽大学


图片来源:安徽大学
感谢你的阅读,希望有所帮助!
以上是对关于人形机器人关节模组电机技术方案全景深洞察:轴向磁通、球形关节、一体化伺服系统(节选),完整版在知识星球[SysPro|人形机器人关节模组(方案咨询、对标报告)]专栏发布(全文13500字),欢迎阅读学习,希望有所帮助!更多关于电机技术前瞻方案的技术报告、参考资料、方案资讯可在知识星球中查阅。